Our solution relies on the research conducted by Ludovic Saint-Bauzel and Fabien Vérité in the field of sensory substitution/augmentation through kinesthetic feedback (see research page for more details).

Fabien Vérité
Associate professor
ISIR – Sorbonne Université
« Since September 2019, I joined the AGATHE team and more specifically the Surgical Cockpit project. This project aims to propose new interfaces for minimally invasive surgery in order to allow each surgeon to operate by laparoscopy as easily as by laparotomy. learning by relying on robotic comanipulation and augmented reality technologies.
Saudrais, C., Bayle, B., Vitrani, M., & Verité, F. (2022). End-of-instrument Stiffness Perception Device Based on Sensory Augmentation for Laparoscopic Surgery. CRAS 2022 Proceedings, 1–2.
Within this project, my research focuses on the creation of haptic feedback devices in order to increase tactile sensations during laparoscopic surgery and training. »
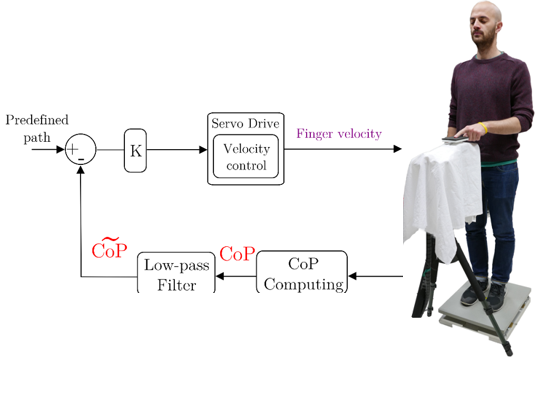
« During my thesis, I was interested in the possibility of creating a tactile biofeedback device to help control standing posture in humans. The objective is to provide the central nervous system with additional information related to posture. The originality of our approach is to influence posture without requiring any voluntary action from the participant. »
Verité, F., Bachta, W., & Morel, G. (2014). Closed Loopinesthetic Feedback for Postural Control Rehabilitation. IEEE Transactions on Haptics, 7(2), 150–160.
Vérité, F., & Bachta, W. (2021). Cognitive processes and a centre-of-pressure error-based moving light-touch biofeedback. Neuroscience Letters, 749.
Ludovic Saint Bauzel
Associate professor
ISIR – Sorbonne Université

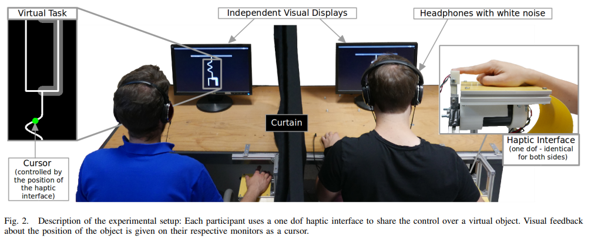
« Exploring the intelligibility of intricate systems such as AI and robots, and harnessing kinesthesia as a novel communication channel, forms the crux of my investigation. My focus extends to formulating a kinesthetic grammar or lexicon, addressing the challenge of comprehending and conveying actions. Employing a methodology grounded in human-human interaction modeling, we endeavor to forge innovative interactions between humans and robots. »
Lucas Roche, Anish Monachan, Ludovic Saint-Bauzel. An experimental study of parameters influencing physical Human-Robot negotiation in comanipulative tracking task.. IEEE/RSJ International Conference on Intelligent Robots and Systems, Nov 2019, Macau, China. ⟨hal-01953081v2⟩